

海洋エネルギー利用研究部門
本部門では海洋エネルギー利用に資する工学と水産学の科学技術の研究開発を行っています。(図1)
メカトロニクス分野は工学技術の研究を行い、海洋エネルギー機器やその利用に必要となるロボットとIoTの開発に注力しています。海洋ロボット、海洋発電、海底ケーブル、浮体係留索、海中充電、構造物検査ロボット、環境対策自律船、海中モニタリングシステム、海洋機械の製造や故障診断のためのIoT技術など、開発対象は多岐に渡っています。
海洋水産応用科学分野は海洋環境・生態系の保全と経済的な持続性が確保された次世代水産業を構築するために、海洋エネルギーや関連施設を利用する漁業、養殖業、水産加工業などの海洋・水産技術の開発や研究に、様々な分野の研究者と協力して取り組んでいます。また、インテリジェント養殖などの次世代水産システムの研究開発にも着手しています。
英国エジンバラ大学、ヘリオットワット大学、スターリング大学、オランダデルフト工科大学等とMOUを締結し、高度で実用的な研究と人材育成にも尽力しています。
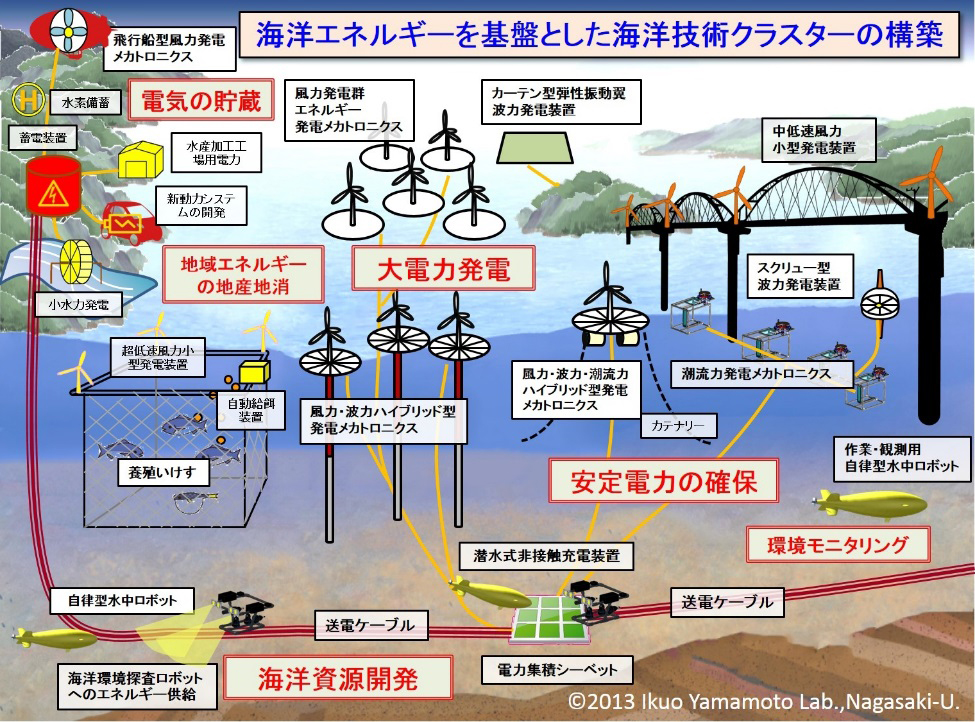 図1:海洋エネルギーを基盤とした海洋技術クラスターの構築
図1:海洋エネルギーを基盤とした海洋技術クラスターの構築
メカトロニクス研究分野
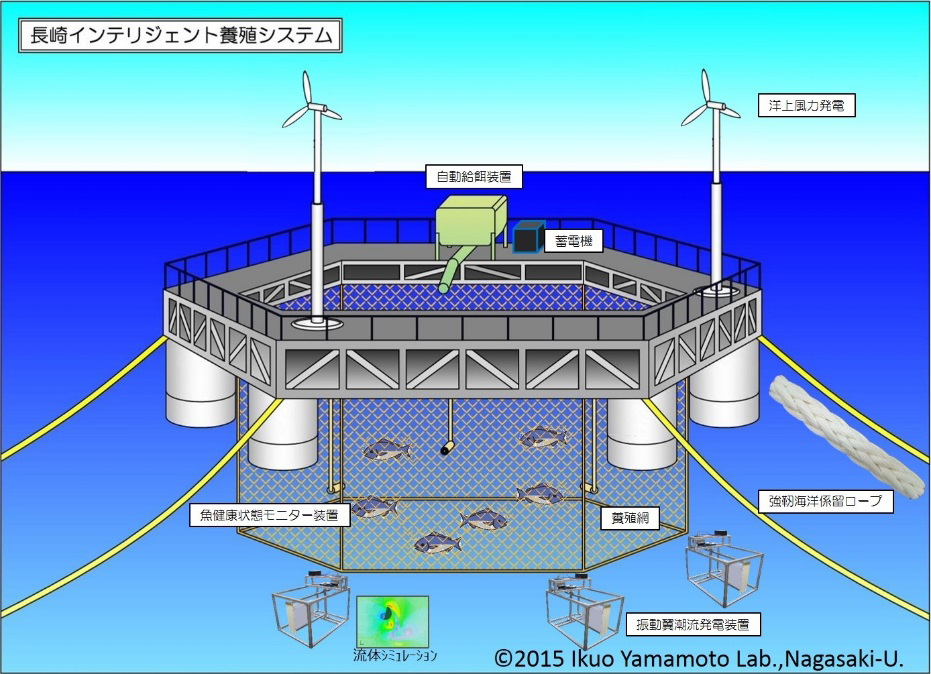
世界最先端の先進的ロボットメカトロニクスシステムの研究を行っています。例えば、海洋探査(図2)、構造物検査、生物運動型(図3)、環境対策自律船(図4)、海水サンプリング飛行(図5)、振動翼水流発電(図6)、波力発電(図7)、揺れない移乗機(図8)等のロボットシステムや強靭海洋ロープ、スマート海底ケーブル、海中非接触充電、電池、洋上風力発電群最適制御、インテリジェト養殖(図9)、造船IoT等のメカトロニクスシステム開発に取り組んでいます。
 図2:海洋探査ロボットSEABOT
図2:海洋探査ロボットSEABOT 図3:生物運動型ロボット RAYBOT
図3:生物運動型ロボット RAYBOT
 図3:生物運動型ロボット IRUBOT
図3:生物運動型ロボット IRUBOT
 図4:環境対策自律船
図4:環境対策自律船
 図4:環境対策自律船
図4:環境対策自律船
 図5:海水サンプリング飛行ロボットAKABOT
図5:海水サンプリング飛行ロボットAKABOT
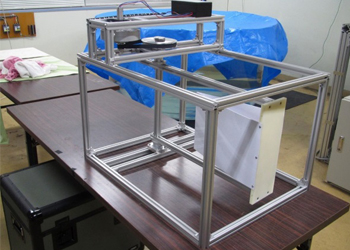 図6:振動翼水流発電装置
図6:振動翼水流発電装置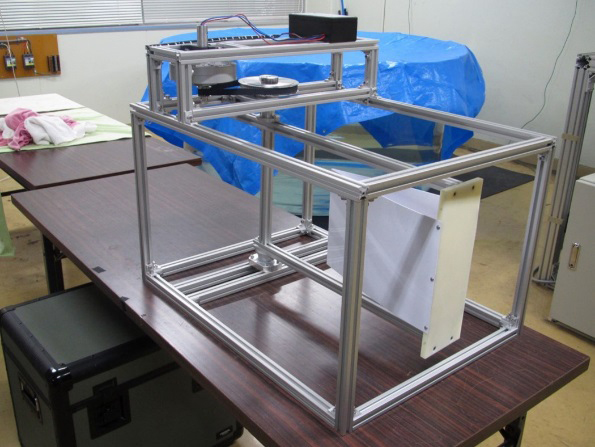
 図7:波力発電装置
図7:波力発電装置
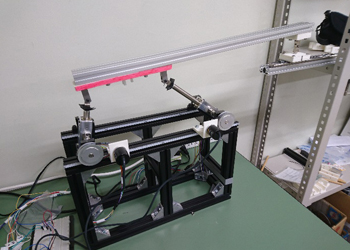 図8:揺れない移乗機
図8:揺れない移乗機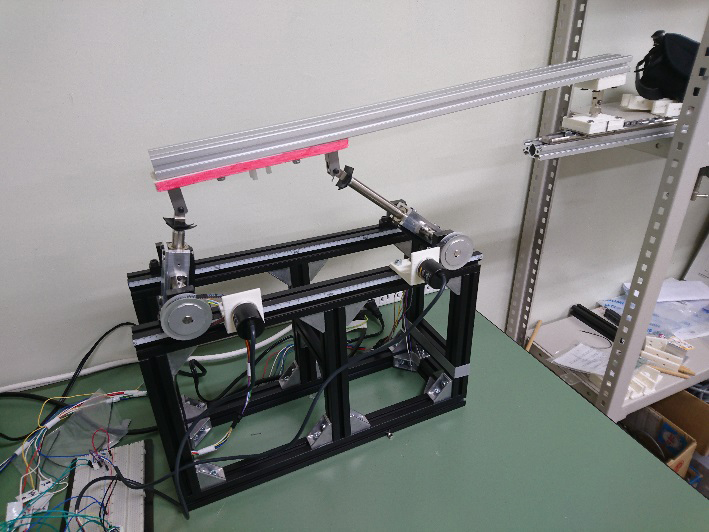
海洋水産応用科学分野
海洋環境・生態系の保全と経済的な持続性が確保された次世代の水産業を構築するために、海洋エネルギーや関連施設を利用する新しい海洋・水産技術の開発・研究に取り組んでいます。そのために海洋生物学や栄養科学、政治経済学など専門が異なる研究者が連携して、漁業、養殖業、水産加工業に関係する学際的研究に着手しています。
 図10:浮体構造物への魚類の蝟集状況調査
図10:浮体構造物への魚類の蝟集状況調査
 図10:浮体構造物への魚類の蝟集状況調査
図10:浮体構造物への魚類の蝟集状況調査

図11:海洋生物付着の状況
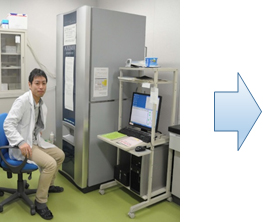 水産物由来生理活性物質の同定
水産物由来生理活性物質の同定
(MALDI-TOFMSによる解析) 水産物由来生理活性物質の機能性・安全性評価
水産物由来生理活性物質の機能性・安全性評価
(培養細胞を用いた解析)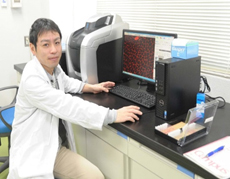 水産物由来生理活性物質の機能性・安全性評価
水産物由来生理活性物質の機能性・安全性評価
(蛍光顕微鏡を用いた解析)
図12 水産物に含まれる生理活性物質・機能性成分解析の流れ