



 受験生
受験生 在学生
在学生 卒業生
卒業生 保護者等
保護者等 地域・一般
地域・一般 企業・研究者
企業・研究者 教職員
教職員
2021年07月28日
- 教育・研究
- 社会連携・貢献
世界遺産でインフラ船ロボットの実証実験を行いました
長崎大学海洋未来イノベーション機構(山本郁夫研究室)はインフラ点検用船ロボットを開発し、世界遺産である小菅修船場跡で公開実験を行いました。
これまでダイバーが行っていた小菅そろばんドックの水中点検を無人ロボットで行うことで、長時間安全に水中点検ができるようになります。
船ロボットは用途に応じてカスタマイズが可能で、山本研究室では採水可能な船ロボットも開発中で、地球規模で問題となっている海洋プラごみ採取や赤潮のもとになる有害プランクトンの採取実験を今後行う予定です。
 小菅修船場跡 |
 小菅ソロバンドック |
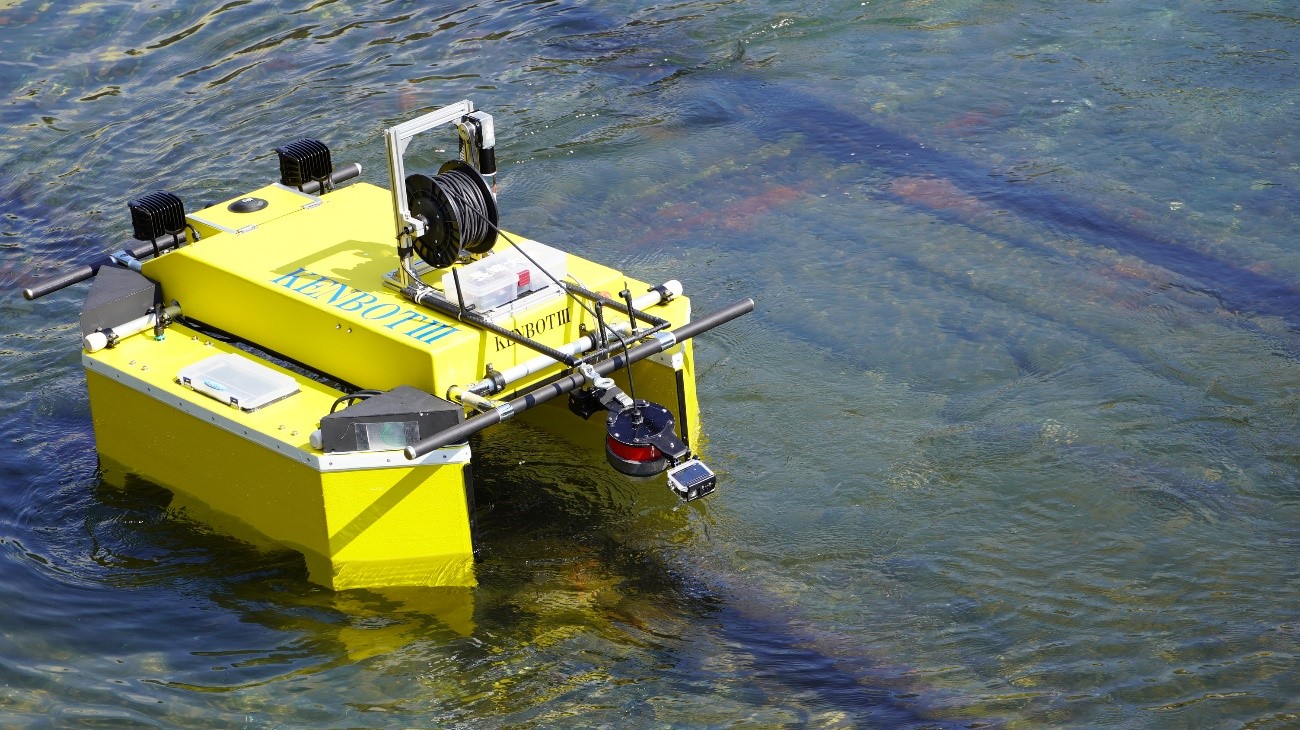
 KENBOTⅢによる水中点検 |
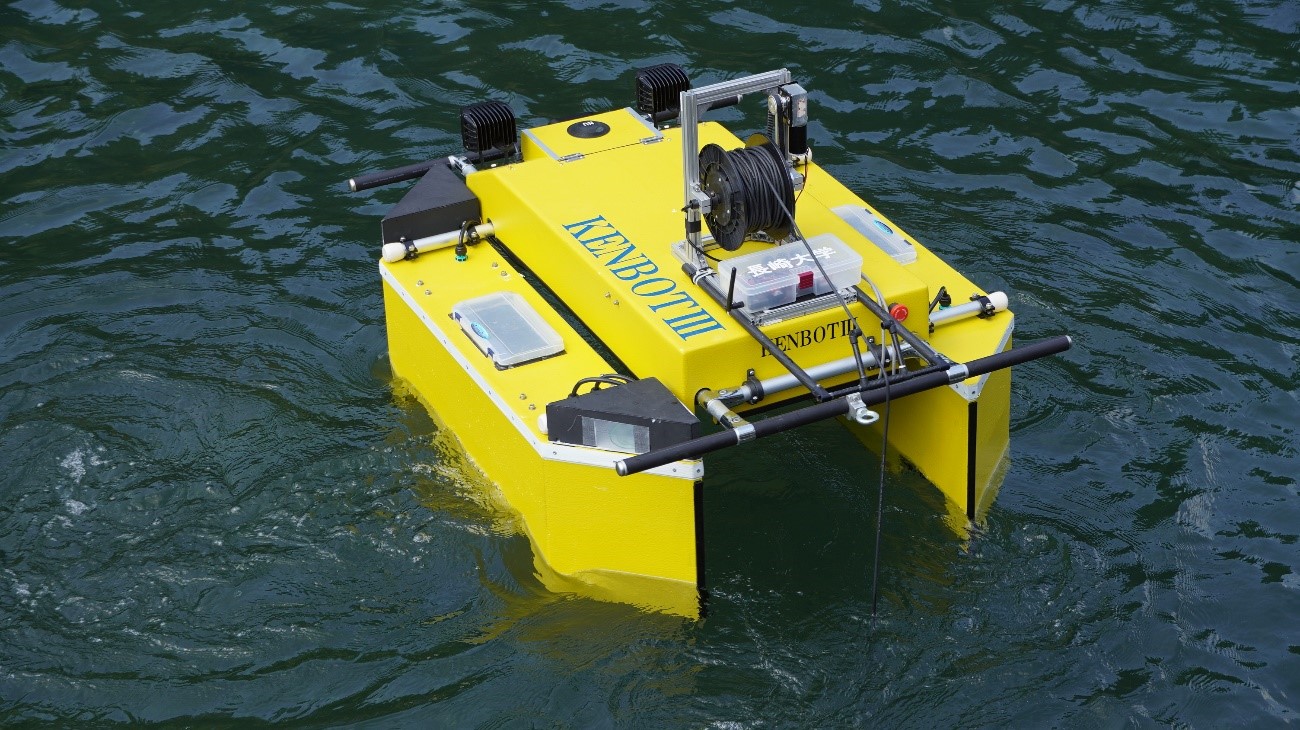 KENBOTⅢ |
 |
 |
 |
◆船ロボットについて◆
開発された船ロボットはその場で回頭(まわる)ことができるなど運動性能に優れ、水中、水上カメラを装備し、海や川から橋梁の暗渠(通常のドローンでは撮影が難しい場所)での撮影が可能で、撮った画像から橋梁などのインフラ構造物のひび割れ等劣化点検ができます。
山本研究室では鷹島の元寇船沈没海域の撮影を皮切りに文化遺産撮影方面の試みを行っており、小菅ソロバンドックで水中のレールや側壁の石垣等の点検に役立つ文化遺産保全のための画像収得を行い、データを積み上げることで今後、造船所の岸壁やドックの点検、造船所の入る前の港内に入った船の損傷点検にも活用でき、港湾の入り組んだ構造物、狭い入り江の水中点検にも役立ちます。
飛行ドローンと船ロボットを組み合わせることで、従来にない高精度の橋梁の3Dオルソ画像を様々な角度から作成できるため、今後、老朽化したインフラの点検を効率的かつ正確に行うことが期待されます。
(※)オルソ画像…撮像の位置ずれを無くし、傾きの無い正しい大きさと位置に表示されるように変換した画像
| ◆詳細◆ 長崎大学HP ニュース欄(2021年06月25日) 山本郁夫教授研究室がインフラ点検用船ロボット3姉妹を開発 https://www.nagasaki-u.ac.jp/ja/news/news3355.html |
 |
