



 受験生
受験生 在学生
在学生 卒業生
卒業生 保護者等
保護者等 地域・一般
地域・一般 企業・研究者
企業・研究者 教職員
教職員
2021年12月06日
- 研究
日本財団・英国スコットランド国際開発庁国際研究事業のAUV・ROV海中ドッキングシステムの開発が成功裏に完了
長崎大学海洋未来イノベーション機構山本郁夫教授研究室は、日本財団・英国スコットランド国際開発庁国際研究事業「効率的な海底機器検査技術システムに関する研究」にて実施のAUV(Autonomous Underwater Vehicle:自律型無人潜水機)とROV(Remotely Operated Vehicle:遠隔操作型無人潜水機)との海中ドッキングシステムの開発(図1)と海中ドッキング試験に成功しました(図2)。
本研究は三菱重工業(株)との共同研究で実施し、弊大学は全体システム設計とAUVドッキング機構付きROV(JYUBOT)の開発・製作及び実験を主に行いました。これによりAUVの充電が海中で行えるため、洋上風車海底ケーブルの検査等に用いられるAUVの大幅な稼働率向上が期待されます。
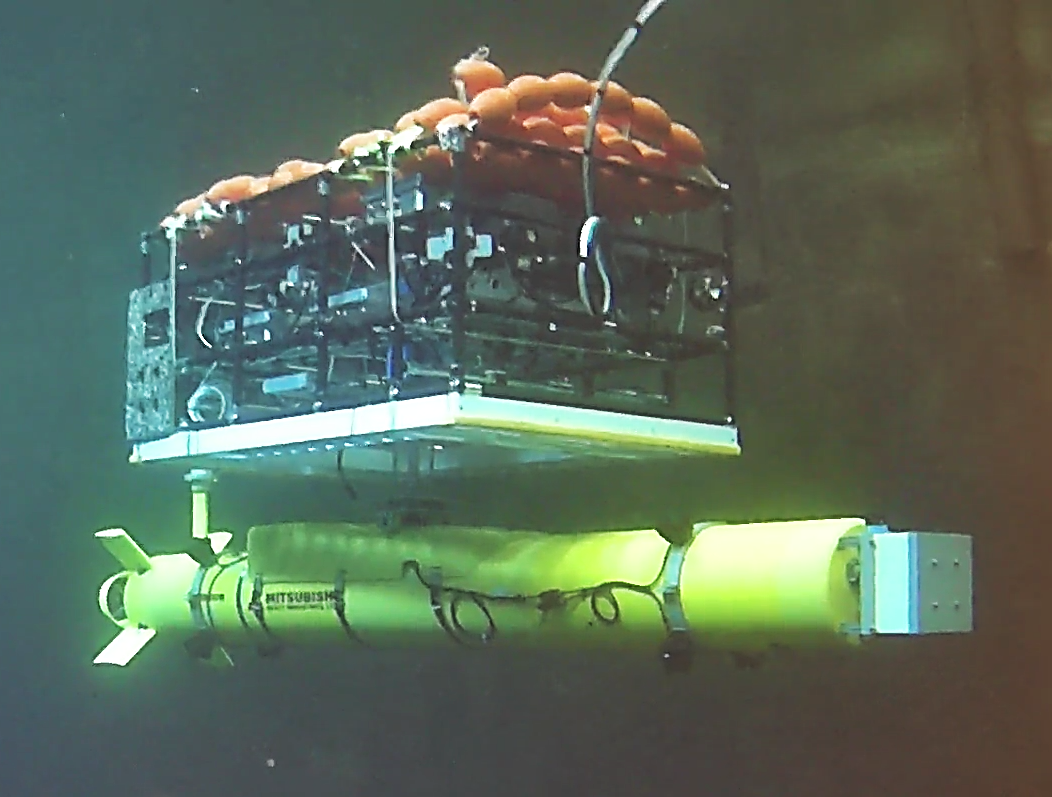 図1 AUV・ROV海中ドッキングシステム
図1 AUV・ROV海中ドッキングシステム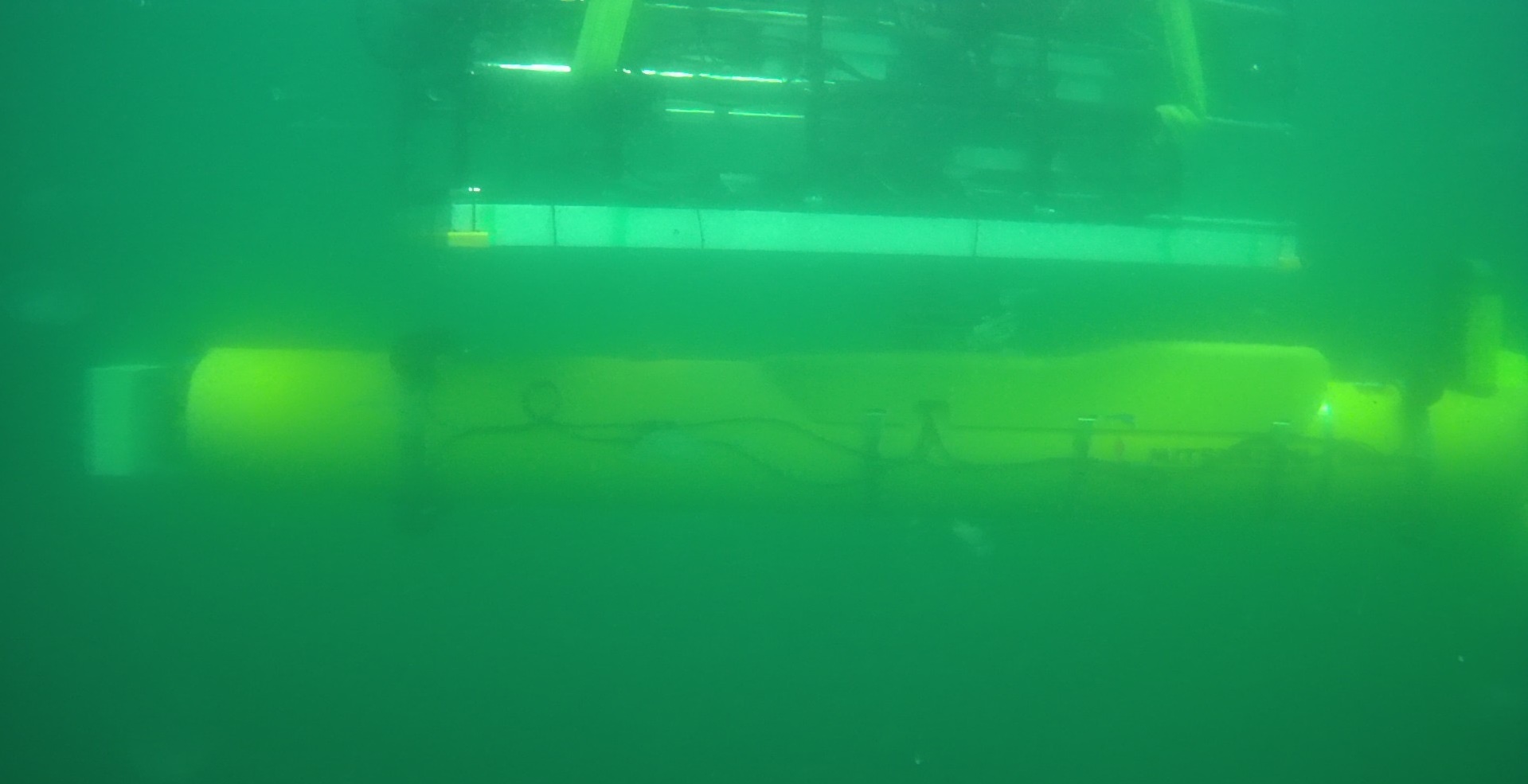
図2 大村湾での海中ドッキング試験
