



 受験生
受験生 在学生
在学生 卒業生
卒業生 保護者等
保護者等 地域・一般
地域・一般 企業・研究者
企業・研究者 教職員
教職員
2024年07月29日
道路自律検査車両ロボットを開発 ~通行障害物を自動認識しながら自動走行し、道路のひび割れなどを検査~
長崎大学 山本 郁夫教授研究室は、大成ロテック株式会社と共同で、歩道空間を対象とした道路自律検査車両ロボットを開発しました。(写真1)
本ロボットはAI(人工知能)を搭載し、段差や電柱などの通行障害物を自動認識しながら自動走行し、(写真2)道路のひび割れやポットホールの損傷検査を行います。
2023年11月、2024年3月、7月と3回にわたり長野県伊那市の歩道や通学路にて走行試験を行い、酷暑、降雪、降雨時でも安定した走行が可能であり、道路の傾斜対応や高圧線下通信影響対策も良好であることが確認できました。また、準天頂衛星信号受信機を搭載すれば、損傷位置を精度良く特定できます。
今後もさらに改良を進め、通学路の安全確保等の道路空間整備に役立つロボットとして実用性を高めていく予定です。
 (写真1)歩行空間自律検査車両ロボット (写真1)歩行空間自律検査車両ロボット |
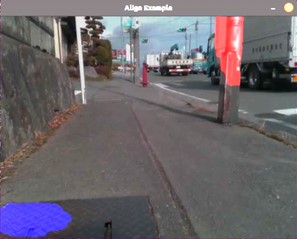 (写真2)AIによる障害物識別走行画像 (写真2)AIによる障害物識別走行画像(電柱とマンホールを識別) |
