



 受験生
受験生 在学生
在学生 卒業生
卒業生 保護者等
保護者等 地域・一般
地域・一般 企業・研究者
企業・研究者 教職員
教職員
2024年08月02日
自律船と海中ロボットからなる次世代モビリティを開発し、海中のCO2濃度計測や、藻場の生育状態把握の実験に成功 ~海中CO2濃度の大幅な低減に藻場が大きく寄与することを確認~
長崎大学海洋未来イノベーション機構 山本郁夫教授研究室は、海洋におけるCO2吸収・循環過程の見える化のために、次世代モビリティの開発を行いました。
次世代モビリティは自律船(ASV)(図1)と海中ロボット(ROV)(図2)により構成され、ASVと、そこに搭載して連動させる藻場観測用カメラ搭載ROVとの連携により藻場画像の収得(図3)および、搭載されたp CO2センサやpHセンサによる海中CO2濃度計測が可能です。
この度、一般社団法人カーボンリサイクルファンドのご支援により、同機構NISHIHARA Gregory Naoki教授研究室の協力を得て、2023年11月(藻場減退期)、2024年6月〈繁茂期)に上五島藻場海域で次世代モビリティの観測実験を行いました。その結果、藻場が海中CO2濃度を大幅に下げることに大きく寄与することがわかりました。
この実験の成功により、海のCO2低減によるカーボンニュートラルへの貢献や藻場の体積把握によるブルーカーボンクレジット化に繋がる技術が生み出されました。長崎大学海洋未来イノベーション機構は今後も様々な海域への展開に鋭意取り組んでまいります。
協力先:JAMSTEC、気象庁気象研究所
 図1 開発した自律船(ASV:Autonomous Surface Vehicle) 図1 開発した自律船(ASV:Autonomous Surface Vehicle) |
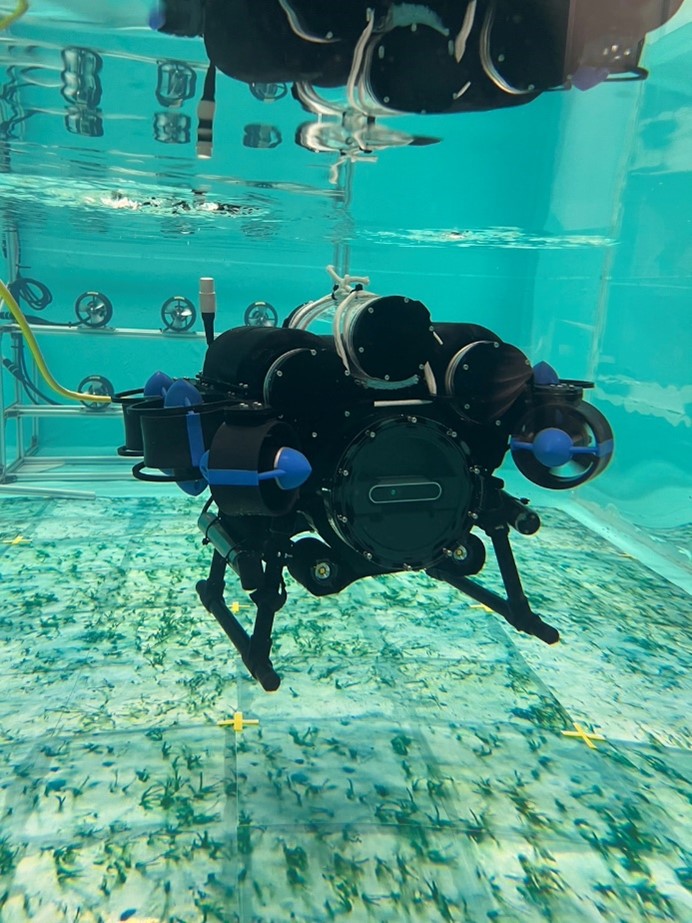 図2 海中ロボット 図2 海中ロボット(ROV:Remotely Operated Vehicle) |
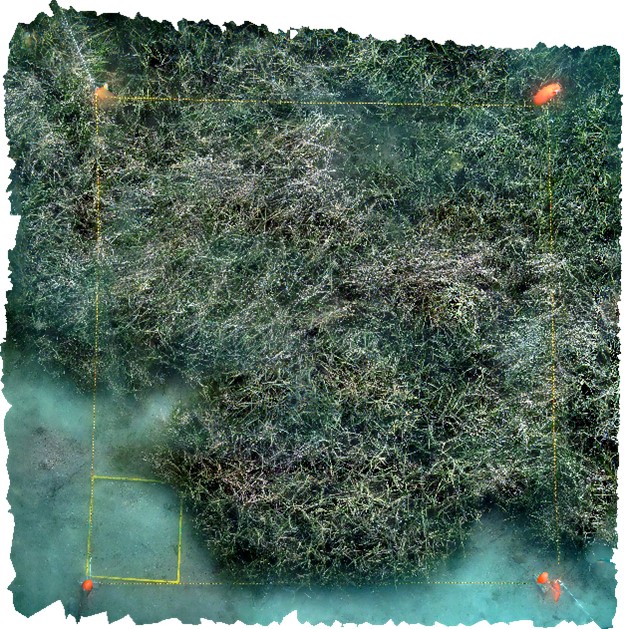 図3 撮像した藻場画像 図3 撮像した藻場画像 |
